Uvod u mreže u automobilima: CAN-Bus, LIN-Bus, FlexRay, Ethernet i prethodnici
1980 1986 1990s 1996 1999 2006 2015+
| | | | | | |
RS-232 K-Line J1850 CAN LIN FlexRay Automotive Ethernet
U današnjim automobilima, elektronika nije više luksuzna dodatna oprema – ona je srce funkcionalnosti vozila. Sve od motora, kočnica, klima uređaja, pa do sistema za asistenciju pri vožnji i info-zabavnih sistema, zahteva savršeno usklađenu komunikaciju između desetina ili čak stotina elektronskih kontrolnih jedinica (ECU). Ali kako sve te jedinice komuniciraju međusobno? Tu na scenu stupaju automobilske mreže.
Početak komunikacije između modula
Još 1980-ih, sa porastom broja elektronskih sistema u vozilima, postalo je jasno da konvencionalno žičanje (tzv. “point-to-point”) postaje neodrživo. Svaki novi sistem zahtevao je dodatne žice, što je povećavalo masu vozila, kompleksnost sklapanja i cenu proizvodnje. Automobilska industrija je odgovorila razvojem serijskih komunikacionih mreža koje su omogućile više modula da dele iste prenosne linije.
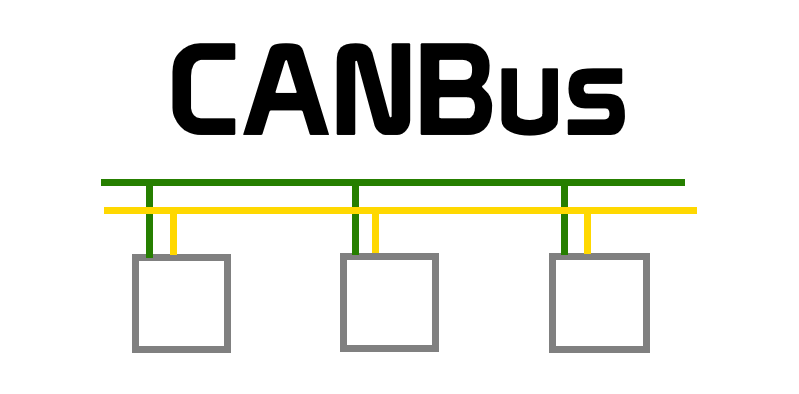
CAN-Bus (Controller Area Network) – Standard industrije
Prvi put predstavljen od strane kompanije Bosch 1986. godine, CAN-Bus je postao zlatni standard za komunikaciju između kontrolnih jedinica. Njegova glavna prednost je otpornost na smetnje, determinističko ponašanje i brzina prenosa od 125 kbps do 1 Mbps. Uvođenjem OBD-II standarda 1996. godine u SAD, a kasnije i u Evropi, CAN-Bus je postao obavezan u skoro svim vozilima.
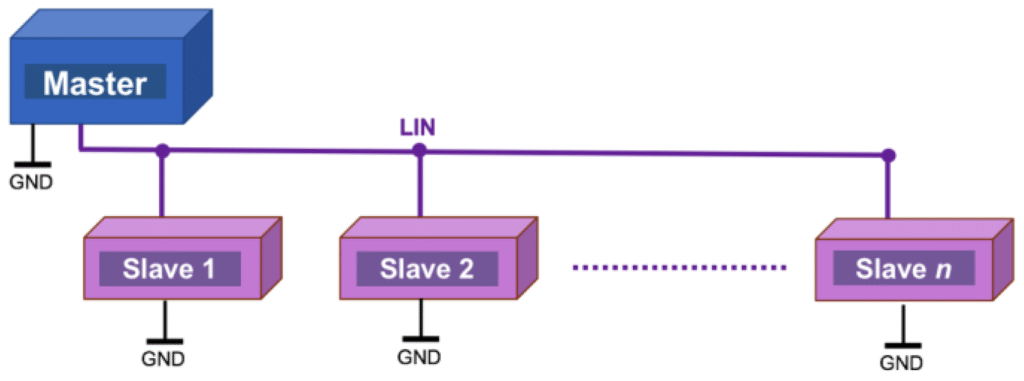
LIN-Bus (Local Interconnect Network) – Jednostavnost i ekonomija
Kako bi se pokrile potrebe jeftinijih i manje zahtevnih sistema poput prozora, sedišta ili ogledala, razvijen je LIN-Bus 1999. godine. Ova mreža koristi jedinstvenu glavnu jedinicu (master) koja upravlja komunikacijom sa više podređenih jedinica (slave). LIN je jeftiniji i sporiji (do 20 kbps), ali savršen za zadatke koji ne zahtevaju visoku brzinu prenosa.
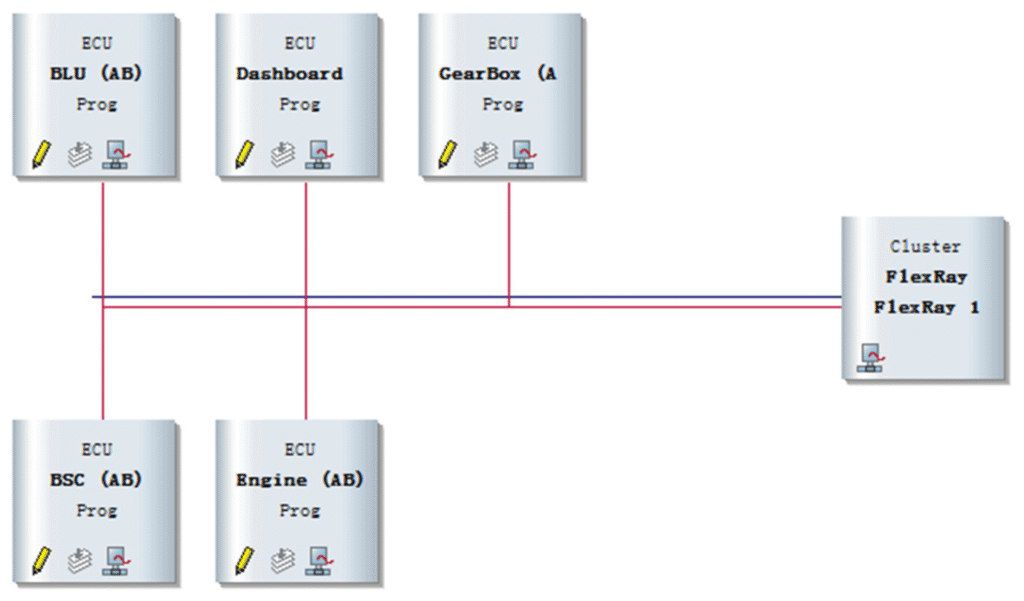
FlexRay – Za zahtevne sisteme i budućnost autonomije
Za sisteme gde brzina i sigurnost znače život ili smrt, poput naprednih sistema za upravljanje (steer-by-wire, brake-by-wire), razvijen je FlexRay. Uveden sredinom 2000-ih, FlexRay nudi brzinu prenosa do 10 Mbps, determinističku komunikaciju i više sigurnosnih mehanizama. Iako nije masovno usvojen kao CAN, koristi se u vozilima visoke klase i autonomnim platformama.
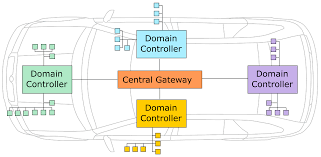
Automotive Ethernet – Visokopropusna budućnost
Sa pojavom kamera, radara i LIDAR senzora, tradicionalne mreže više nisu dovoljne. Automotive Ethernet donosi brzine od 100 Mbps pa do 1 Gbps, podržava složene aplikacije i multimedijalne sisteme. Zahvaljujući skalabilnosti i standardizaciji (BroadR-Reach), Ethernet postaje kičma budućih vozila, pogotovo u svetu autonomne vožnje.
Stari sistemi – Korači ka standardizaciji
Pre nego što su standardizovane mreže poput CAN-Bus-a stupile na scenu, automobilska industrija koristila je niz jednostavnih i vlasničkih protokola za komunikaciju sa elektronskim modulima. Najpoznatiji među njima su:
- K-Line (ISO 9141-2): Jedna od prvih serijskih komunikacionih linija, razvijena 1980-ih. K-Line je koristila jednu žicu za dvosmernu komunikaciju između ECU-a i dijagnostičkih alata. Iako je jednostavna, bila je ograničena u brzini (10.4 kbps) i pogodna samo za osnovnu dijagnostiku.
- ISO 9141 i ISO 14230 (KWP2000): Ovi protokoli su korišćeni u mnogim evropskim i azijskim vozilima pre uvođenja CAN-Bus-a. KWP2000 (Keyword Protocol 2000) predstavlja unapređenje K-Line protokola sa podrškom za naprednije komande.
- SAE J1850 (PWM i VPW): Ovaj standard je bio dominantan u američkim vozilima tokom 1990-ih. Postojao je u dve varijante: Pulse Width Modulation (PWM) i Variable Pulse Width (VPW). Iako je omogućavao višekanalnu komunikaciju, ograničenja u brzini i skalabilnosti postala su očigledna sa rastom broja ECU jedinica.
- Serijska komunikacija (UART, RS-232): Neki proizvođači su koristili jednostavne serijske protokole bazirane na standardima poput RS-232 za internu ili servisnu komunikaciju. Međutim, ovi sistemi nisu bili pogodni za real-time kontrolu u vozilu.
Ovi rani sistemi su postavili temelje, ali su zbog ograničenja u brzini, sigurnosti i interoperabilnosti ustupili mesto robusnijim i skalabilnijim rešenjima poput CAN-Bus-a, koji je omogućio novu eru kompleksne, pouzdane i sinhronizovane komunikacije u vozilima.
Pre ovih modernih mreža, korišćeni su razni vlasnički (proprietary) protokoli koje su razvijali sami proizvođači: kao što su K-Line (ISO 9141), J1850, i razne varijacije serijske komunikacije. Iako jednostavni, ovi sistemi nisu mogli da odgovore na kompleksnost savremenih potreba, što je dovelo do razvoja univerzalnijih rešenja poput CAN i njegovih naslednika.
Zaključak
Razvoj mreža u automobilima je neizbežan rezultat rastuće potrebe za inteligentnijim, sigurnijim i povezanim vozilima. Od jednostavnih žica do gigabitne Ethernet komunikacije, mreže su postale centralni nervni sistem modernih automobila. Razumevanje ovih sistema je ključ za uspešnu dijagnostiku, servisiranje i razvoj novih tehnologija u automobilskoj industriji.
U narednim tekstovima na blogu detaljno ćemo obraditi svaki od pomenutih komunikacionih sistema pojedinačno – CAN-Bus, LIN-Bus, FlexRay, Ethernet i druge, sa posebnim fokusom na njihovu primenu, prednosti, dijagnostiku i realne primere iz prakse. Ovaj tekst je samo uvod u tu kompleksnu i uzbudljivu temu. je neizbežan rezultat rastuće potrebe za inteligentnijim, sigurnijim i povezanim vozilima. Od jednostavnih žica do gigabitne Ethernet komunikacije, mreže su postale centralni nervni sistem modernih automobila. Razumevanje ovih sistema je ključ za uspešnu dijagnostiku, servisiranje i razvoj novih tehnologija u automobilskoj industriji.